By Texas Instruments 349
Ⅰ.Introduction to L293D
L293D is an integrated circuit commonly used in DC motor drives. It is a dual H-bridge driver that can control the direction and speed of two DC motors. This chip is often used in embedded systems and robotics projects to provide precise control of motors.
The L293D is a basic motor driver integrated chip (C) capable of driving a DC motor in either direction and controlling the motor's speed. L293D is a 16-pin IC with 8 pins on each side, which can control the motor very well. Typically, a single L293D can be used to run up to two DC motors. L293D consists of two H-bridge circuits. H-bridge is the simplest circuit used to change the polarity of the load connected to it.
The L293D has 2 output pins, 2 input pins and 1 enable pin for dry driving each motor. It is designed to drive inductive loads such as solenoids, relays, DC motors and bipolar stepper motors, as well as other high current/high voltage loads.
Ⅱ.Introduction to ULN2003
The ULN2003 is a commonly used integrated circuit that is a relay and stepper motor driver with high current drive capabilities. This chip is often used to control larger loads, such as stepper motors or relays, by providing a stable current drive to operate these loads.
ULN2003 is an IC chip widely used in electronic products, providing a high-current Darlington array with seven open-collector outputs, mainly used to handle high voltages and large currents. The ULN series includes ULN2002A, ULN2003A, ULN2004A and three different variants with multiple packaging options, with ULN2003 being the widely used variant in the ULN series.

Ⅲ.Pin configuration of L293D and ULN2003
1.L293D
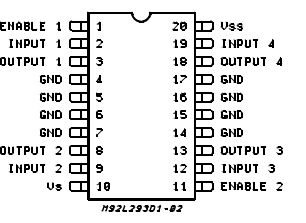
•Pin1(Enable 1-2):When this pin is high level or logic 1, the left side of the IC works. When it is low level, the left side does not work.
•Pin2(INPUT 1):When this pin is high level or logic 1, output 1 becomes high level.
•Pin3(OUTPUT 1):This pin is connected to one of the terminals of motor 1.
•Pin4,5(GND):Should be connected to the ground of the circuit.
•Pin6(OUTPUT 2):This pin is connected to one of the terminals of motor 1.
•Pin7(INPUT 2):When this pin is high level or logic 1, output 2 becomes high level.
•Pin8(VCC2):This is the voltage required to run the motor. IT can be greater than the IC voltage (VCC1).
•Pin9(Enable 3-4):When this pin is high level or logic 1, the right side of the IC works. When it is low level, the right side does not work.
•Pin10(INPUT 3):When this pin is high level or logic 1, output 3 becomes high level.
•Pin11(OUTPUT 3):This pin is connected to one of the terminals of motor 2.
•Pin12,13(GND):Should be connected to the ground of the circuit.
•Pin14(OUTPUT 4):This pin is connected to one of the terminals of motor 2.
•Pin15(INPUT 4):When this pin is high level or logic 1, output 4 becomes high level.
•Pin16(VCC1):It powers the L293D IC, therefore, 5V should be supplied to this pin.
2.ULN2003
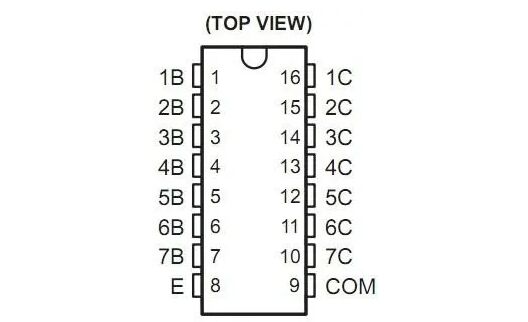
•Pin 1:CPU pulse input terminal, the port corresponds to a signal output terminal.
•Pin 2:CPU pulse input terminal.
•Pin 3:CPU pulse input.
•Pin 4:CPU pulse input.
•Pin 5:CPU pulse input.
•Pin 6:CPU pulse input terminal.
•Pin 7:CPU pulse input terminal.
•Pin 8:Ground.
•Pin 9:This pin is the common terminal of the cathode of the seven internal freewheeling diodes. The anode of each diode is connected to the collector of each Darlington tube. When used for inductive loads, this pin is connected to the positive pole of the load power supply to achieve freewheeling. If this pin is connected to ground, it is actually the collector of the Darlington tube that is connected to ground.
•Pin 10:Pulse signal output terminal, corresponding to pin 7 signal input terminal.
•Pin 11:Pulse signal output terminal, corresponding to pin 6 signal input terminal.
•Pin 12:Pulse signal output terminal, corresponding to pin 5 signal input terminal.
•Pin 13:Pulse signal output terminal, corresponding to pin 4 signal input terminal.
•Pin 14:Pulse signal output terminal, corresponding to pin 3 signal input terminal.
•Pin 15:Pulse signal output terminal, corresponding to pin 2 signal input terminal.
•Pin 16:Pulse signal output terminal, corresponding to pin 1 signal input terminal.
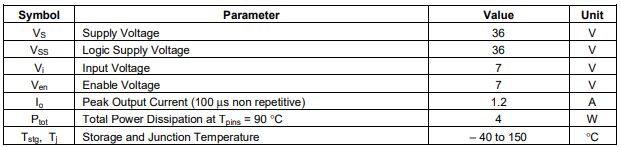
Ⅳ.Absolute Maximum Ratings of L293D and ULN2003
•L293D
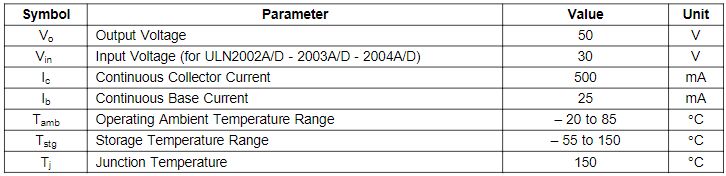
•ULN2003
Ⅴ.Application fields of L293D and ULN2003
1.L293D
•Robotics technology: L293D is a motor drive chip that is often used in robot projects to drive the wheels or joints of the robot to achieve precise control of the robot's movement. It has the characteristics of high current output capability, low power consumption, high withstand voltage, etc., and has a built-in protection diode to protect the motor from overvoltage and overcurrent damage. In the robot project, L293D can be used to drive two DC Motor or stepper motor, by adjusting the duty cycle of the input signal, precise control of the motor speed and direction can be achieved. In addition, the L293D can also control the speed and direction of the motor by using PWM (Pulse Width Modulation) signals to achieve precise movement and attitude control of the robot.
•Household appliances: L293D can be used to control household appliances that require motor control, such as electric curtains, electric doors, etc. By connecting the L293D motor driver chip and the corresponding motor, automatic control of electric curtains and electric doors can be realized. For electric curtains, L293D can drive the motor to rotate forward and reverse, thereby opening and closing the curtains; for electric doors, L293D can drive the motor to open and close the door, and can also realize automatic control of the door. Using the L293D motor driver chip to control household appliances has the advantages of high precision, high stability, and low noise. It can also extend the service life of the motor and improve the safety and convenience of electrical appliance control.
•Small cars: L293D can be used to control DC motors in small electric vehicles (such as cars and remote control cars) to drive the wheels of the vehicle. In this application, the L293D motor driver chip can be connected to one or two DC motors. By adjusting the duty cycle of the input signal, the speed and direction of the motor can be controlled, thereby achieving vehicle motion and attitude control.
•Automation system: L293D is a commonly used motor driver chip, which is often used in automation systems to control various drive units, such as conveyor belts, industrial robot arms, etc. It is a high-voltage, high-current chip that can effectively control the rotation direction, speed and torque of the motor. In automation systems, L293D is usually used to connect microcontrollers or PLCs with motor drivers to achieve precise control of the motor.
•Entertainment electronic products: L293D is also widely used in entertainment electronic products. For example, in some electric toys, model airplanes, etc., L293D can be used to control the rotation direction, speed and torque of the motor to achieve various actions and movements of the toy or model. By connecting the L293D to a microcontroller or other circuits, precise control of the motor can be achieved, thereby providing players with a richer and more realistic entertainment experience.
2.ULN2003
•Stepper motor control: ULN2003 is often used to drive stepper motors, especially in applications that require precise control of stepper motors, such as printers, CNC machine tools, automatic door systems, etc. A stepper motor is a motor that can achieve precise motion by controlling the number and frequency of pulses. ULN2003 is a commonly used stepper motor driver chip that converts the signal output by the microcontroller into current and voltage that can drive the stepper motor. Using ULN2003 to drive stepper motors can achieve precise control, the two most critical aspects of which are pulse number and pulse frequency. By controlling the rotation amount of the stepper motor corresponding to each pulse, the precise positioning of the motor can be achieved; at the same time, by controlling the pulse frequency, the rotation speed of the motor can be controlled.
•Nigital tube driver: ULN2003 can be used to control the display of 7-segment digital tubes and realize digital display by driving different digital tube segments. The 7-segment digital tube is a common digital display device. It consists of 7 LED segments (labeled A to G) and an optional point (DP), which can be used to display numbers from 0 to 9. Using ULN2003 to drive a 7-segment digital tube, you can display the required numbers by controlling the corresponding LED segments. Specifically, ULN2003 can output a high-level or low-level signal to drive each LED segment, thereby controlling the display of the digital tube. .
•Relay drive: Due to the high current drive capability of ULN2003, it is often used to drive relays, especially in applications that need to control high current loads, such as industrial automation systems. A relay is a switching device that can control high current loads. By driving the relay with ULN2003, the purpose of controlling high current loads with low current can be achieved, thereby protecting the microcontroller from damage due to high current. When using ULN2003 to drive a relay, you need to connect the relay coil to the output pin of ULN2003, and use the relay contacts to control the on and off of high current loads. When ULN2003 outputs high level, the coil of the relay is energized, the contacts are closed, and the high current load is turned on. When ULN2003 outputs low level, the coil of the relay loses power, the contacts are disconnected, and the high current load is disconnected.
•Lighting control: Used to control high-power LED light strips, bulbs or other lighting equipment to achieve switching and brightness adjustment of lights.
•Lab equipment: In laboratories and research projects, the ULN2003 can be used to control motors or other high current loads in experimental equipment. In research projects, ULN2003 is also widely used in various automation systems and robots to control the movement and precise position of motors. For example, in biomedical engineering, ULN2003 drive motors are used to operate microscopes or perform precision surgeries, and in aerospace engineering, ULN2003 drive motors are used to operate machine tools or perform other important tasks.
•Switching control: Switching control of some high current loads can be achieved through ULN2003. ULN2003 can be used to control the switch of electric fans. By using ULN2003, enough current can be provided to drive a high-power fan, and the on/off state of the fan can be controlled through the output signal of a microcontroller or other logic circuit. In some automatic door systems, ULN2003 can be used to control the opening and closing of electric doors. By using ULN2003, reliable control of the electric door motor can be achieved, allowing it to open and close smoothly. For some electromagnet applications that require strong current, ULN2003 can also be used to control their switching state. This may have applications in some automated systems or laboratory equipment.
Ⅵ.The difference between L293D and ULN2003
1.Driving mode:
•L293D: L293D is a dual H-bridge driver, mainly used for forward rotation, reverse rotation and speed control of DC motors. It is suitable for applications requiring control of direction and speed.
•ULN2003: ULN2003 is a driver composed of seven NPN switches, mainly used for switching control of high current loads, such as relays and stepper motors.
2.Power supply voltage:
•L293D: Usually operates at lower supply voltage, such as 5V to 12V.
•ULN2003: Can adapt to higher power supply voltage, usually between 7V and 50V.
3.Output quantity and type:
•L293D: L293D has two independent H-bridges and can control two DC motors. Each H-bridge includes four switching elements.
•ULN2003: ULN2003 has seven NPN switches, which are suitable for controlling multiple loads at the same time, but are usually used for the control of a single large current load.
4.Current driving capability:
•L293D: It has relatively high current driving capability and is suitable for some small and medium power DC motors.
•ULN2003: Integrated with seven switches, it can be used to control large current loads, such as driving relays.
Ⅶ.Common points between L293D and ULN2003
1.Can be used to drive motors: Both can be used to drive motors, but L293D is mainly used for the control of DC motors, while ULN2003 is more commonly used for the control of stepper motors and relays.
2.Power supply: Both require an external power supply to provide the necessary voltage to the circuitry inside the driver.
3.Suitable for low-voltage circuits: L293D and ULN2003 are generally suitable for low-voltage circuits, especially in embedded systems and small electronic projects.
4.Logic level control: Both L293D and ULN2003 can be controlled by logic levels (such as the digital output of a microcontroller). The state of the output pin can be controlled by providing appropriate logic levels on the input pin.
Frequently Asked Questions
1.Does L293D have built-in current protection?
L293D does not provide built-in current protection function. It is mainly a dual H-bridge driver used to control the forward, reverse and speed of DC motors, but does not include a dedicated current protection circuit in the design.
2.What are the advantages of L293D?
It is simple and easy to use, suitable for low-power motors, dual H-bridge design, built-in diodes, and suitable for low-voltage applications.
3.How many channels does ULN2003 have?
ULN2003 consists of seven NPN Darlington pairs, making it capable of driving up to seven separate loads.
4.How to use ULN2003 with Arduino?
The driver board has two pins labeled GND and VCC, which are the two power supply pins. The GND pin of the ULN2003 driver board must be connected to the GND pin of the Arduino. Likewise, the driver board's VCC pin should be connected to the Arduino's 5V pin.